Line Equation in 3D
Related Topics: Plane Equation
Download: StarGenerator.zip
- Line Equation
- Intersection of 2 Lines
- Example: Intersection of 2 Lines (Interactive Demo)
- Intersection of Line and Plane
- Example: Intersection of Line and Plane (Interactive Demo)
- Example: Star Generator
- Intersection of Line and Sphere
Line Equation
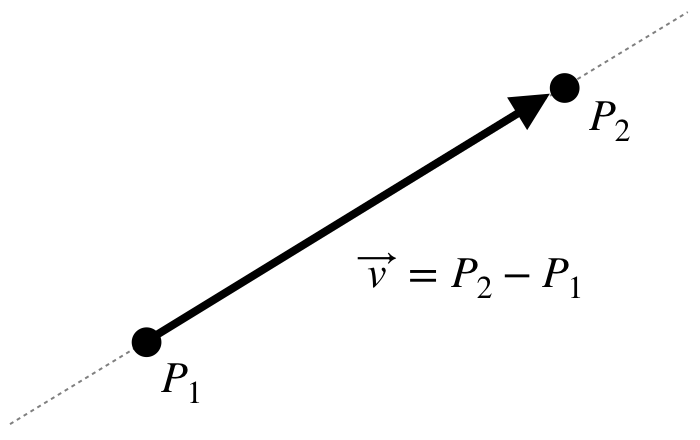
The equation of a line is defined with 2 known points. This page describes a line equation using parametric form; a point ![]() on the line and the direction vector
on the line and the direction vector ![]() of the line.
of the line.
The direction vector can be computed by subtracting 2 known points;
![]()
Therefore, the parametric form of the line equation is;

Or, each element (x, y, z) of the line can be written by the parameter t;
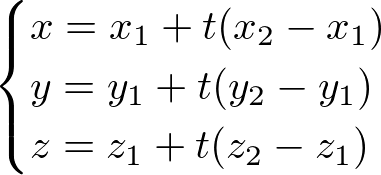
Notice that it is same as linear interpolation formula on each axis. If 0 < t < 1, it is an interpolation, otherwise extrapolation.
Also note that 2D line equation is frequently represented with slope-intercept form ![]() or standard form
or standard form ![]() . However these forms are not suitable for computer algorithms because the slope of a vertical line is undefined (±∞), and plus the slope-itercept form cannot be used in 3D space.
. However these forms are not suitable for computer algorithms because the slope of a vertical line is undefined (±∞), and plus the slope-itercept form cannot be used in 3D space.
Intersection of 2 Lines
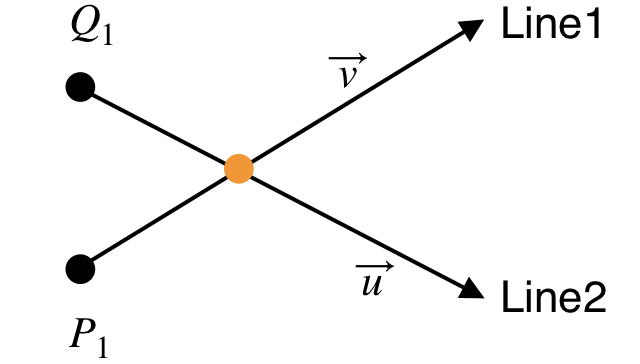
The intersection point of 2 lines is solving the linear system of 2 lines using vector algebra.
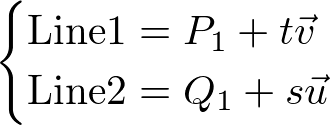
First, solve the linear system, Line1 = Line2 for t. Then substitute t into Line1 equation to find the intersection point (x, y, z).
(Reference: Intersection of two lines in three-space, Ronald Goldman, Graphics Gems, page 304, 1990)
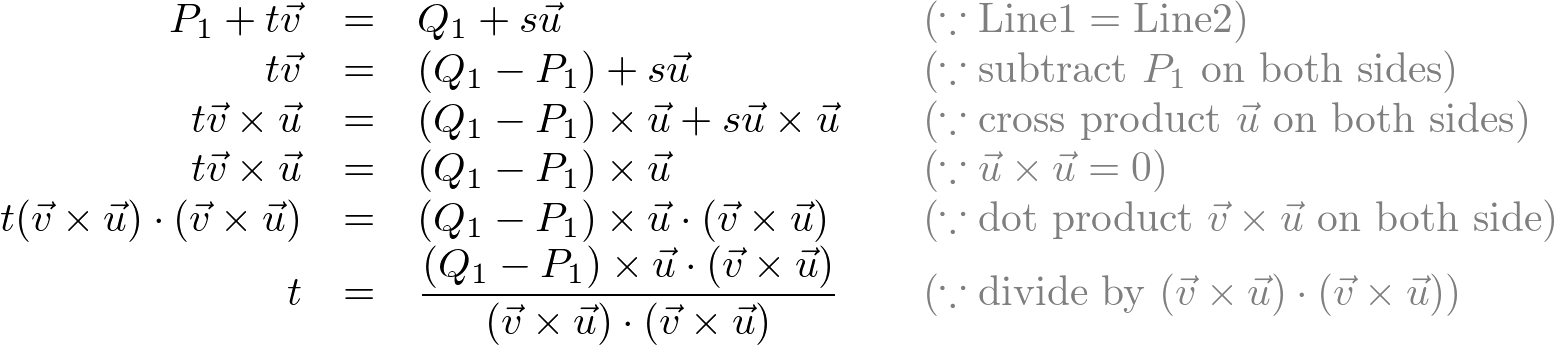
If two lines are parallel, the cross product of 2 direction vectors of the lines becomes zero. You can determine if two lines are intersect or not with;
![]()
Here is C++ code to find the intersection point of 2 lines. Please see the details in Line.cpp.
// dependency: Vector3, Line
struct Vector3
{
float x;
float y;
float z;
};
class Line
{
Vector3 direction; // (Vx, Vy, Vz)
Vector3 point; // (Px, Py, Pz)
};
Vector3 intersect(Line& line1, Line& line2)
{
Vector3 p = line1.point; // P1
Vector3 v = line1.direction; // v
Vector3 q = line2.point; // Q1
Vector3 u = line2.direction; // u
// find a = v x u
Vector3 a = v.cross(u); // cross product
// find dot product = (v x u) . (v x u)
float dot = a.dot(a); // inner product
// if v and u are parallel (v x u = 0), then no intersection, return NaN point
if(dot == 0)
return Vector3(NAN, NAN, NAN);
// find b = (Q1-P1) x u
Vector3 b = (q - p).cross(u); // cross product
// find t = (b.a)/(a.a) = ((Q1-P1) x u) .(v x u) / (v x u) . (v x u)
float t = b.dot(a) / dot;
// find intersection point by substituting t to the line1 eq
Vector3 point = p + (t * v);
return point;
}
Example: Intersection of 2 Lines in 2D (Interactive Demo)
The following JavaScript interactive demo is finding the intersection point from 2 lines in 2D. It requires WebGL enabled browsers.
Intersection of Line and Plane
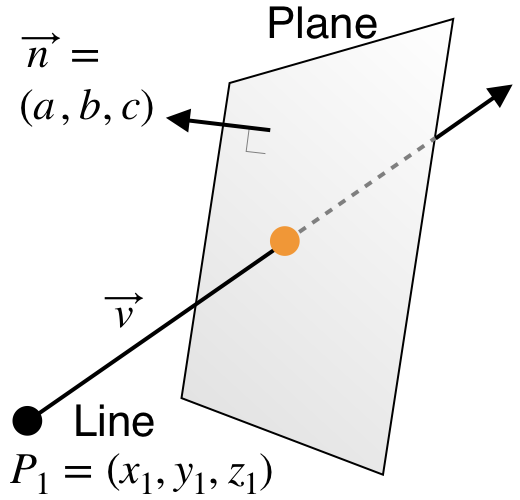
A plane equation in 3D is defined with its normal vector ![]() and a known point on the plane;
and a known point on the plane;
![]()
Please refer to Plane Equation to see how to derive the plane equation.
Finding the intersection point of a line and plane is solving a linear system of a line and plane.

First, substitute ![]() of the plane equation with
of the plane equation with ![]() from the line equation. Then, solve for t;
from the line equation. Then, solve for t;
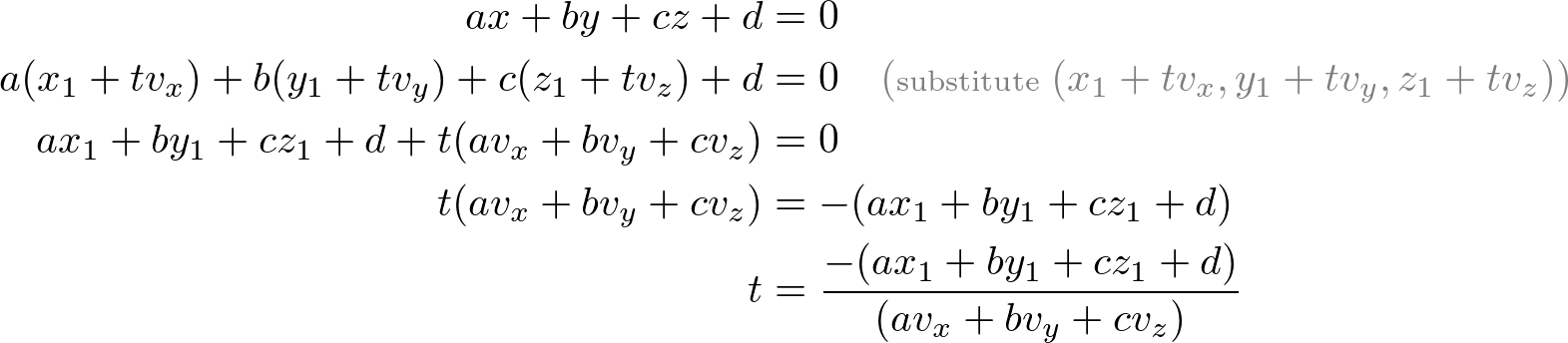
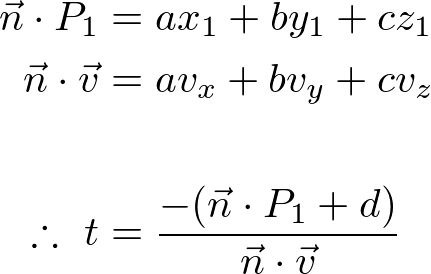
If the denominator part is zero, there is no intersection. And the sum of multiplications of the above equation can be replaced with dot products;
Here is C++ code to find the intersection point of a line and a plane.
// dependency: Vector3, Line, Plane
struct Vector3
{
float x;
float y;
float z;
};
class Line
{
Vector3 direction; // v
Vector3 point; // p
};
class Plane
{
Vector3 normal; // (a, b, c)
Vector3 d; // constant term: d = -(a*x0 + b*y0 + c*z0)
};
Vector3 intersect(Line& line, Plane& plane)
{
// from line = p + t * v
Vector3 p = line.point; // (x1, y1, z1)
Vector3 v = line.direction; // (Vx, Vy, Vz)
// from plane: ax + by + cz + d = 0
Vector3 n = plane.normal; // (a, b, c)
Vector3 d = plane.d; // constant term of plane
// dot products
float dot1 = n.dot(v); // a*Vx + b*Vy + c*Vz
float dot2 = n.dot(p); // a*x1 + b*y1 + c*z1
// if denominator=0, no intersect
if(dot1 == 0)
return Vector3(NAN, NAN, NAN); // return NaN point
// find t = -(a*x1 + b*y1 + c*z1 + d) / (a*Vx + b*Vy + c*Vz)
float t = -(dot2 + d) / dot1;
// find intersection point by substituting t to line eq
return p + (t * v);
}
Example: Intersection of Line and Plane (Interactive Demo)
The following JavaScript interactive demo is finding the intersection point from a line and a plane in 3D. Use left and right mouse buttons to rotate the view, or to zoom in and out. It requires WebGL enabled browsers.
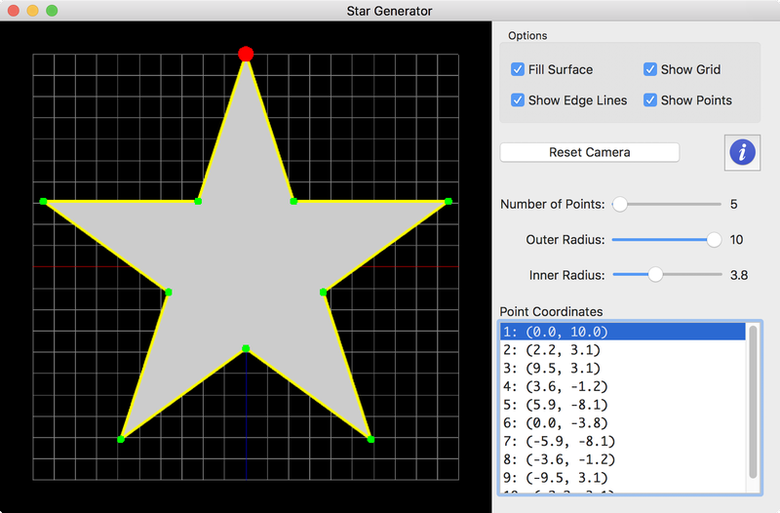
Example: Drawing N-point Star
Download source and binary:
![]() StarGenerator.zip (VS2022) (Updated: 2025-09-09)
StarGenerator.zip (VS2022) (Updated: 2025-09-09)
![]() StarGenerator_mac.zip (Updated: 2023-04-25)
StarGenerator_mac.zip (Updated: 2023-04-25)
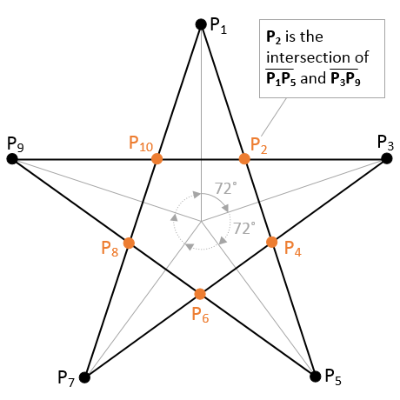
Drawing a N-point star is a practical application using line intersection algorithm. The steps for drawing a star are;
Intersection of Line and Sphere
Finding the intersection point of a line and a sphere is very common in ray tracing algorithm because a sphere is the simplest geometry. One method is to substitute each x, y, z from the parametric line equation to the sphere equation and solve the quadratic equation for t.
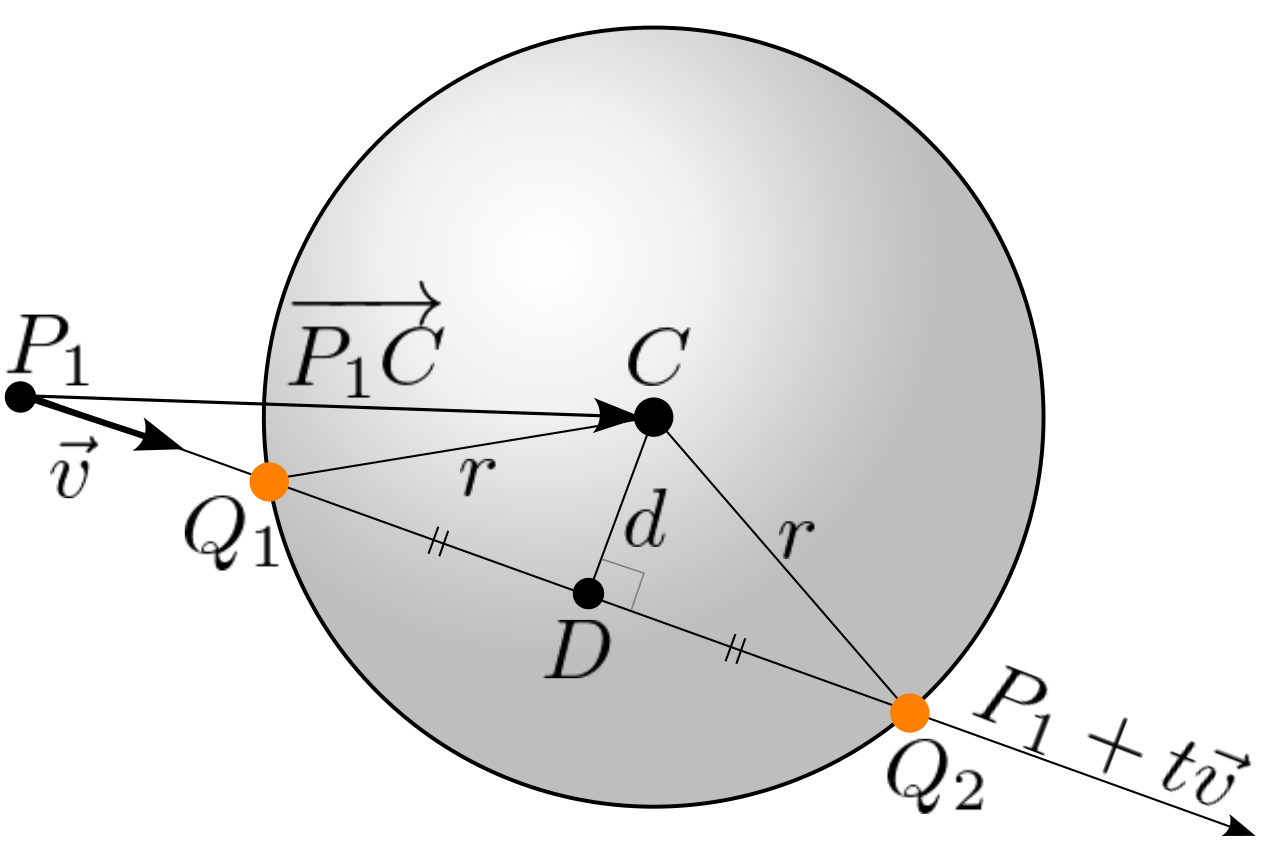
The other method is using vector arithmetic. First, find the length ![]() between the starting point P1 of the line equation and the point D on the line
between the starting point P1 of the line equation and the point D on the line ![]() that is perpendicularly projected from the sphere center, C (See the diagram on the side).
that is perpendicularly projected from the sphere center, C (See the diagram on the side).
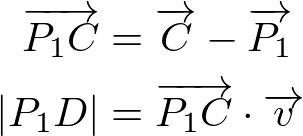
It can be computed by projecting the vector ![]() from P1 to the center of the sphere C onto the line, which is inner product of 2 vectors,
from P1 to the center of the sphere C onto the line, which is inner product of 2 vectors, ![]() and the direction vector
and the direction vector ![]() of the line.
of the line.
Then, find the length ![]() between Q1 and D from 2 right-angle triangles C-D-P1 and C-D-Q1. It is actually the half distance between 2 intersection points Q1 and Q2.
between Q1 and D from 2 right-angle triangles C-D-P1 and C-D-Q1. It is actually the half distance between 2 intersection points Q1 and Q2.
![]()
![]()
Finally, we can find the intersection points, Q1 and Q2 by substituting ![]() and
and ![]() into the line equation for t.
into the line equation for t.
A line can intersect with a sphere in 3 ways. If the d is greater than the sphere radius, there is no intersection. If d is equal to r, then there is only 1 intersection point. If d is less than r, The line and sphere intersect with 2 points.
Here is C++ code to find the intersection points of a line and a sphere. It returns std::vector containing 0, 1 or 2 points. Please see the detail implementation in Line.cpp.
std::vector<Vector3> Line::intersect(Vector3& sphereCenter, float radius)
{
std::vector<Vector3> points; // to store intersect points
float r2 = radius * radius;
// find perpendicular distance from sphere center to the line
Vector3 pc = sphereCenter - point;
float pd = pc.dot(direction); // PC projected on the line
float d2 = pc.dot(pc) - (pd * pd); // squared distance
// if d > r, no intersection (do nothing)
if(d2 <= r2)
{
const float EPSILON = 0.00001f;
if(r2 - d2 < EPSILON) // if d = r, only 1 intersect point
{
points.push_back(point + pd * direction);
}
else // if d < r, 2 intersect points
{
// find half distance between 2 points
float dh = sqrt(r2 - d2);
float t1 = pd - dh; // t for Q1
float t2 = pd + dh; // t for Q2
points.push_back(point + t1 * direction);
points.push_back(point + t2 * direction);
}
}
return points;
}